Unieke betontexturen op architecturale schaal dankzij robotische serendipiteit
-

© Lie Bormans
Lie Bormans: “Robotische serendipiteit is een manier om nieuwe technologie naar onze hand te zetten en een extra bron van architecturale creativiteit aan te boren.”
-

© Wiert Gerats
De sculpturale betongevel van de Escheriaanse uitbouw van de Sint-Annakapel in Dentergem kwam tot stand via robotische serendipiteit.
-

© DMOA Architecten
De sculpturale betongevel van de Escheriaanse uitbouw van de Sint-Annakapel in Dentergem kwam tot stand via robotische serendipiteit.
-

© Wiert Gerats
De sculpturale betongevel van de Escheriaanse uitbouw van de Sint-Annakapel in Dentergem kwam tot stand via robotische serendipiteit.
-

© DMOA Architecten
Lie Bormans: “Dit concept maakt ambachtelijke creatie en architecturale personalisatie mogelijk op een volledig nieuwe schaal.”
-

© Lie Bormans
Lie Bormans: “Dit concept maakt ambachtelijke creatie en architecturale personalisatie mogelijk op een volledig nieuwe schaal.”


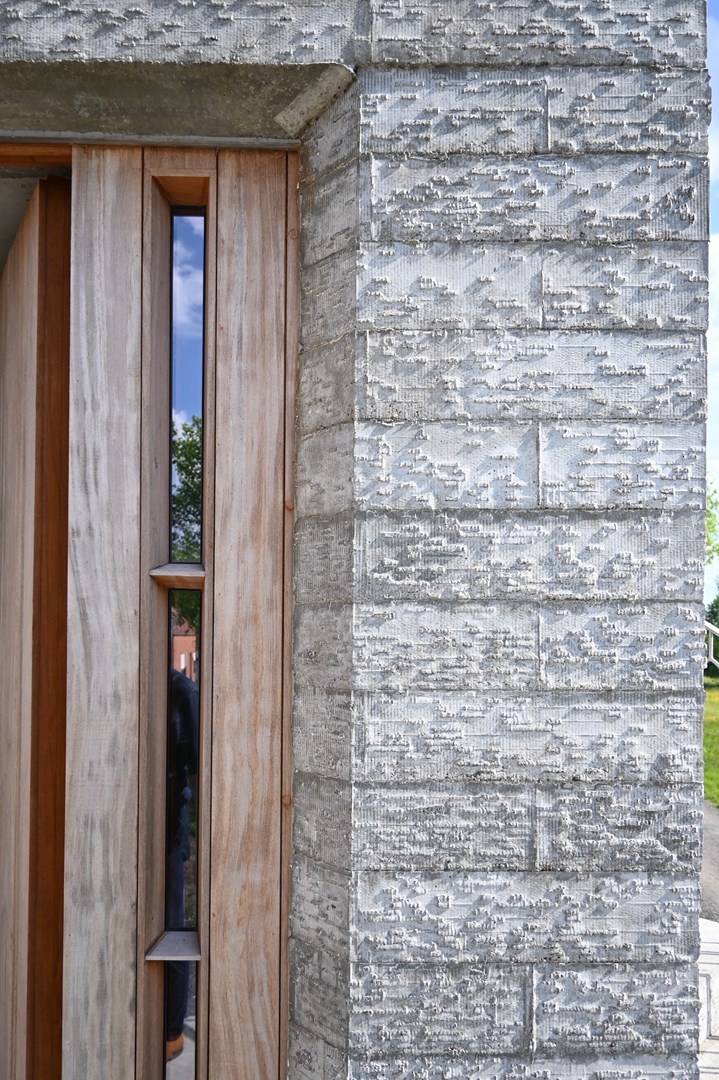

De herbestemming van de Sint-Annakapel in Dentergem is een van de meest spraakmakende architectuurprojecten van de laatste jaren. Dit is niet enkel te danken aan het panoramische dakterras of de unieke vergader- en evenementenruimte die er werd ingericht, maar zeker ook aan de sculpturale betongevel van de Escheriaanse uitbouw, die tot stand kwam via robotische serendipiteit. Hoe dit precies in zijn werk ging, vernamen we van architecte Lie Bormans, die begin vorig jaar samen met DMOA Architecten en het R[x]D-labo van de KU Leuven een Henry van de Velde Award in de wacht sleepte met dit veelbelovende concept. “Robotische serendipiteit biedt het beste van twee werelden: de snelheid en precisie van een robot, gecombineerd met de creatieve hand van een ontwerper.”
Lie, kan je ons allereerst even uitleggen wat robotische serendipiteit inhoudt?
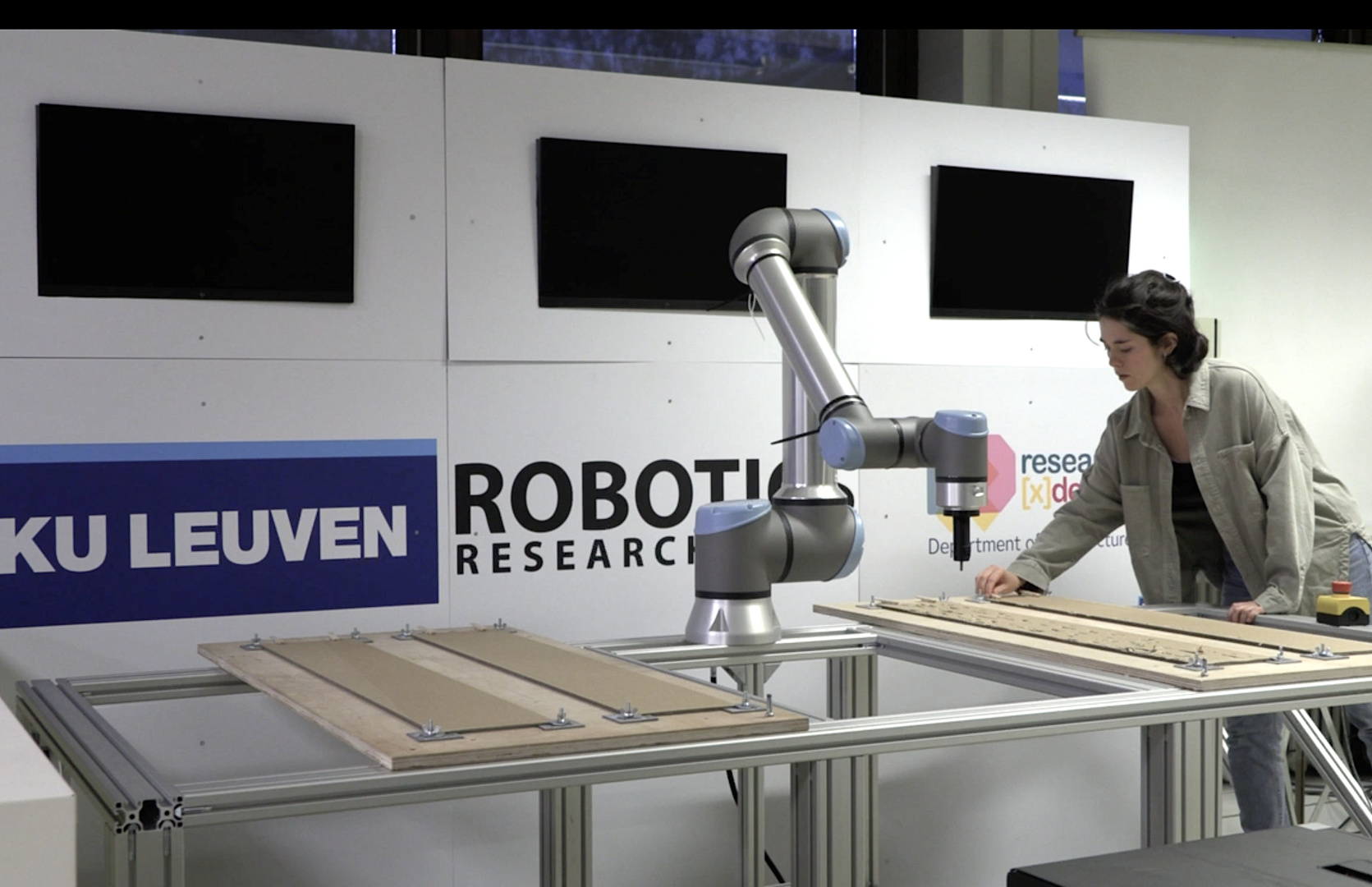
Lie Bormans: “Het is een werkwijze waarmee je op architectonische schaal unieke, abstracte betontexturen kan ontwerpen en creëren, aan de hand van op maat gemaakte kartonpanelen en een robot die het mogelijk maakt om grote oppervlakken te bewerken. Allereerst ga je als ontwerper via hands-on experimenten met de robot op zoek naar interessante texturen en een projectspecifiek patroon, dat vervolgens vertaald wordt naar een computeralgoritme op grotere schaal. Op basis daarvan brengt een robot de tekeningen over op stroken karton, die samen de tekening over de volledige gevel vormen. Vervolgens worden de kartonpanelen in de bekisting geplaatst en wordt het beton gestort, waarbij het de vorm van de kartonnen mal aanneemt. Na ontkisting wordt het karton van de gevel gespoten en komen er ruwe, karaktervolle texturen met een sterk ambachtelijk uitzicht tevoorschijn, en dat op de schaal van een volledige gevel. Robotische serendipiteit is met andere woorden een gelaagde fusie van menselijke expressie, materialiteit en robotica. De term ‘serendipiteit’ heeft betrekking op de onvoorspelbare dimensie die wordt toegevoegd bij de bewerking van het materiaal, waarbij duizenden toevallige imperfecties ontstaan die samen een harmonieus geheel vormen.”
Hoe is de bal oorspronkelijk aan het rollen gegaan? En hoe is dat uiteindelijk uitgemond in een eerste spraakmakend pilootproject, met name de Sint-Annakapel in Dentergem?
“Het begon als een thesisproject bij het R[x]D-team van de KU Leuven, vanwege onze gedeelde interesse om de overlap tussen architectuur en robotica te verkennen. Terwijl robotica doorgaans focust op het creëren van identieke resultaten, zochten wij naar een manier om het proces te verrijken met creativiteit, onvoorspelbaarheid en menselijke imperfecties, zodat robot en ontwerper elkaar kunnen versterken. Via talloze experimenten kwamen we uit bij het ontwerpen van unieke betontexturen. Na een interessante casestudy bij DMOA Architecten kregen we de kans om het effectief in de praktijk toe te passen bij de realisatie van de Sint-AnnakapelBelangrijk hierbij zijn de miljoenen willekeurige, maar gecontroleerde scheurtjes die ontstonden bij het robotisch bewerken van het karton. Het juiste gehalte aan imperfecties brengt een bepaalde spanning en menselijkheid in het geheel, wat doorgaans niet gerelateerd wordt met robotica. Daarnaast prijken er tevens handgegraveerde tekeningen op de gevel, als tatoeages die meer vertellen over de rijke geschiedenis van het pand.”
Afgaande op de hoeveelheid stof die het al deed opwaaien, lijkt jouw innovatieve concept de juiste snaar te raken in de bouw- en architectuurwereld. Hoe verklaar je dat?
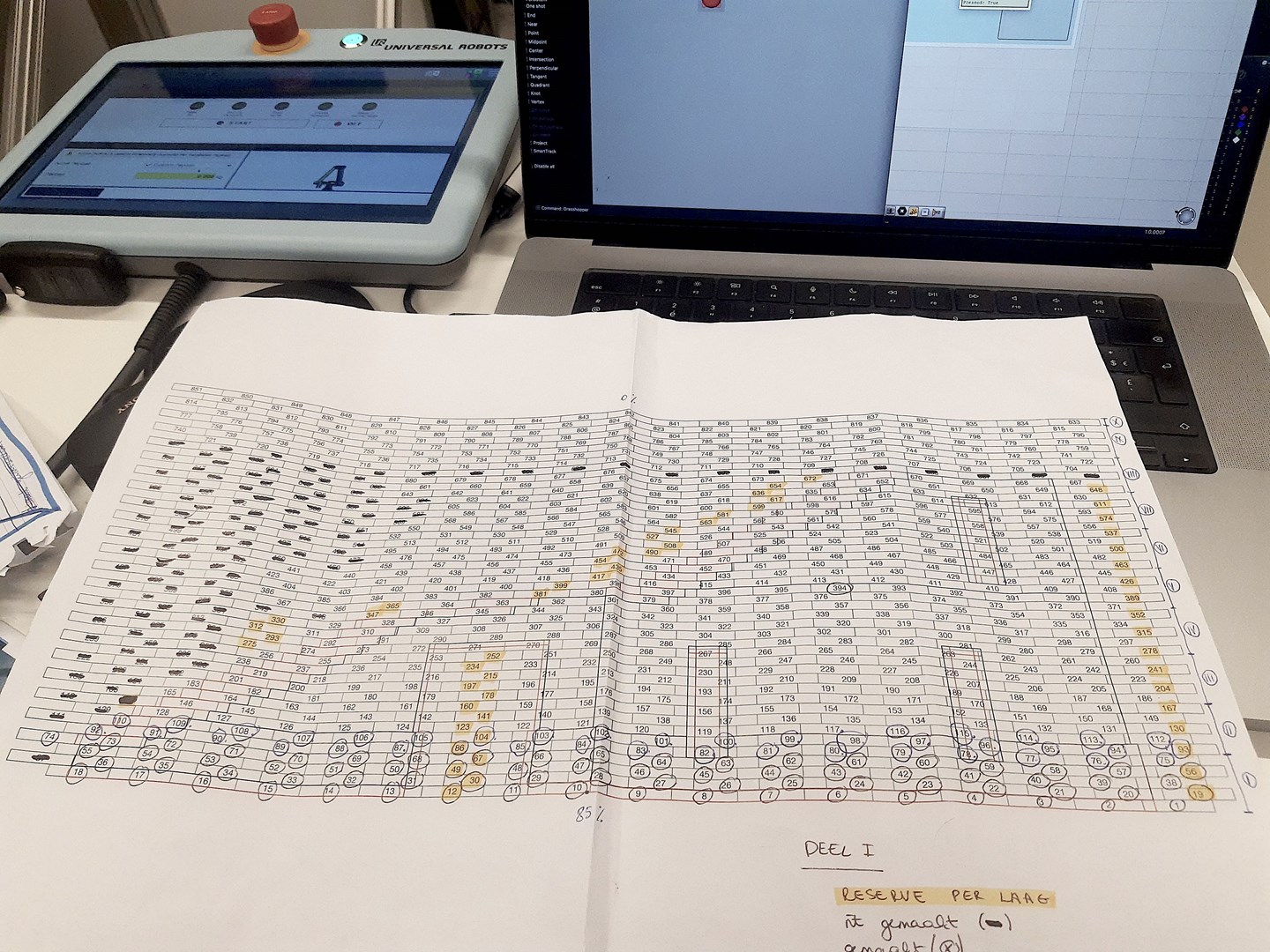
Meer en meer ontwerpers zijn op zoek naar een nieuwe poëtische en menselijke dimensie in architectuur, zeker in tijden van voortschrijdende digitalisering, standaardisering en automatisering. Vandaar dat sommigen graag teruggrijpen naar die aloude ambachtcultuur die momenteel zo onder druk staat. Het lijkt me interessant om ook robotica zijn plek te geven in dat spanningsveld, wat de creatieve mogelijkheden verder zal verruimen. Een concept als robotische serendipiteit is geen extra stap in de richting van die ontmenselijking, maar net een manier om nieuwe technologie naar onze hand te zetten en een extra bron van architecturale creativiteit aan te boren. Voor de Sint-Annakapel in Dentergem zijn meer dan 850 unieke kartonpaneeltjes van 1 meter lang en 17,5 centimeter hoog gemaakt. Had ik dat allemaal manueel moeten doen, dan was dat project simpelweg niet mogelijk geweest. Kortom: qua ambachtelijk, custom design opent robotica een heel nieuwe wereld voor ontwerpers die op zoek zijn naar een unieke touch die hun projecten kan onderscheiden van de massa. In dat opzicht staan we in mijn ogen echt op een nieuw kruispunt in de architecturale geschiedenis, zoals destijds ook het geval was met de art nouveau.”
Bij robotische serendipiteit draait alles rond de creatie van willekeurige imperfecties, terwijl heel wat architecten controlefreaks zijn die dingen niet graag uit handen geven. Is dat geen contradictie?
“Neen, want ik zie robotische serendipiteit net wel als een gecontroleerd proces. Het laat je immers toe om de ‘sfeer’ en uitstraling van een gevel of gebouw volledig zelf te bepalen. Dat de robot zomaar vrije baan zou krijgen, is een misvatting, want er is heel veel onderzoek gegaan naar het bepalen van het speelveld waarbinnen hij zich kan en mag bewegen. De imperfecties worden gecreëerd binnen welbepaalde grenzen, in functie van een harmonieus en haalbaar eindresultaat. Zo maakt robotische serendipiteit ambachtelijke creatie en architecturale personalisatie mogelijk op een volledig nieuwe schaal. En doorbreken we meteen ook het klassieke idee dat robotica op passieve wijze steevast identieke resultaten oplevert. Het opent net een hele waaier van nieuwe creatieve mogelijkheden, en dat begint per definitie bij de ontwerper zelf.”
2024 was een echt ‘doorbraakjaar’, waarbij je zelfs een Henry van de Velde Award op de schouw mocht zetten. Hoe kijk je daar een jaar later op terug?
“Nog steeds enthousiast en toch ook een tikkeltje verwonderd. Ik heb heel fijne, interessante en waardevolle reacties gekregen. Daarmee was mijn missie op zich al geslaagd: iets ontwikkelen dat mensen raakt en vooral ook een concrete praktische invulling kan krijgen. Ik zou het een gemiste kans gevonden hebben mocht mijn onderzoek puur theoretisch gebleven zijn, maar dat is dus niet het geval. Na de hectiek van die eerste maanden hebben we in de tweede helft van het jaar de tijd genomen om het concept verder te laten rijpen en een netwerk uit te bouwen. Er blijkt alleszins veel interesse te zijn voor robotisering in de bouwsector, zowel vanuit functioneel als esthetisch oogpunt. De puzzelstukjes vallen stilaan op hun plek, dus nu is het zaak om te bekijken welke richting we uit zullen gaan.”
Zijn er al concrete toekomstplannen die je kan delen?
“Daar is het nog wat te vroeg voor. Er zijn nog een aantal pistes die onderzocht moeten worden, maar ik ben er wel al uit dat het project in een andere richting mag evolueren dan tot nog toe het geval was, al dan niet via de oprichting van een start-up of met aanvullende partnerships. En op lange termijn zou het een droom zijn om het concept ook te kunnen toepassen bij natuurlijke materialen. Maar zoals ik al zei: we zijn verschillende opties aan het bestuderen, zodat we finaal de juiste keuzes kunnen maken om het concept tot volle wasdom te laten komen. Wordt dus zeker vervolgd!”



